Esta página está en construcción: perdonen
los errores, repeticiones y temas inacabados.
This page is being developed: I am sorry for
errors, duplications and unfinished subjects.
Transformaciones y vistas del esqueleto.
Controles
(incluido en
Danzante)
Hemos tratado estas cuestiones en
Transformaciones del esqueleto y en
Interpolacion de cuaterniones y
matrices. Y, anteriormente, en
Matrices en espacio vectorial 3D y
Movimientos, transformaciones y sus Matrices en
espacio vectorial 3D, y en forma geométrica en
Movimientos y transformaciones en plano y espacio. Descripción
geométrica, todo ello referido a giros y
desplazamientos o translaciones. Además estamos comprendiendo mejor
la relación entre esqueleto en el espacio Kinect (el espacio nuestro
respecto a la cámara) y la representación en pantalla; la
representación Kinect nos ofrece dudas.
En cuanto a su uso y en cuanto a su calidad o adecuación.
 Sigamos ahora
con unos desarrollos de lo
anterior que nos han llevado más trabajo del previsto, especialmente
en el manejo y operaciones entre esqueletos y
sus transformaciones, totales y
parciales (Interpolacion).
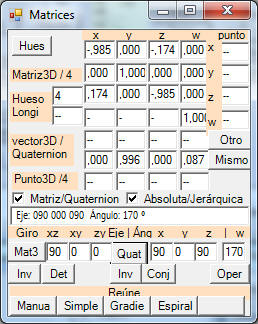
A la izquierda, la ventana actual de
manejo de matrices y cuaterniones, considerablemente ampliada
respecto a la anterior, a la derecha, la cual obtenía y presentaba
las matrices y cuaterniones procedentes del esqueleto Kinect para
sus huesos.
La novedades consisten
principalmente en elegir la procedencia de ambos operadores: pueden
ser los Huesos (HUES) como antes (y esa es la procedencia de los
operadores en la figura izquierda). Pero también fabricárselos
directamente: bien como matrices (MAT3), a partir de tres rotaciones
acumuladas (recordemos que el producto de matrices no es
conmutativo) escritas en ese orden (lueugo ejecutadas en orden
inverso) en los tres planos (xz, xy, zy) alrededor por lo tanto de
sus tres ejes perpendiculares respectivos (esas rotaciones se redinen como ángulos en grados). O bien, por último, mediante
cuaterniones (QUAT), a partir de un eje del cual de eligen sus
ángulos con los tres ejes x,y,z; y un ángulo de rotación alrededor
de ese eje, definido en la casilla w.
La última, y por tanto efectiva,
actual, selección (Hues, Mat, Quat) queda marcada en rojo, pasando a
gris las no elegidas
Los dos últimos operadores pueden
invertirse (INV), y obtener el determinante (DET) de la matriz, y el
conjugado (CONJ) del cuaternión.
La elección de uno u otro método de
obtención , matriz o cuaternión, genera el equivalente en el no
elegido.
Los valores concretos de cada
operador obtenido por alguno de los tres métodos, se publican en las
casillas numéricas apropiadas y tituladas. Información
adicional en el texto ampli encima de la etiqueta "Giro...".
Los botones OTRO y MISMO,
determinan si se renueva el esqueleto Kinect, tomándolo de la
cámara, o bien se emplea el mismo. La elección otro renueva también
los operadores correspondientes al hueso (HUES) en su casilla.
Podemos también tomar como fuente de esqueletos los almacenados en
las mociones en disco: se carga uno en la ventana de Contrapuntos y
Mociones; se TOCA, se PARA y allí mismo se trata (Rota o INterpola)
con los operadores seleccionados antes.
Sigamos ahora
con unos desarrollos de lo
anterior que nos han llevado más trabajo del previsto, especialmente
en el manejo y operaciones entre esqueletos y
sus transformaciones, totales y
parciales (Interpolacion).
A la izquierda, la ventana actual de
manejo de matrices y cuaterniones, considerablemente ampliada
respecto a la anterior, a la derecha, la cual obtenía y presentaba
las matrices y cuaterniones procedentes del esqueleto Kinect para
sus huesos.
La novedades consisten
principalmente en elegir la procedencia de ambos operadores: pueden
ser los Huesos (HUES) como antes (y esa es la procedencia de los
operadores en la figura izquierda). Pero también fabricárselos
directamente: bien como matrices (MAT3), a partir de tres rotaciones
acumuladas (recordemos que el producto de matrices no es
conmutativo) escritas en ese orden (lueugo ejecutadas en orden
inverso) en los tres planos (xz, xy, zy) alrededor por lo tanto de
sus tres ejes perpendiculares respectivos (esas rotaciones se redinen como ángulos en grados). O bien, por último, mediante
cuaterniones (QUAT), a partir de un eje del cual de eligen sus
ángulos con los tres ejes x,y,z; y un ángulo de rotación alrededor
de ese eje, definido en la casilla w.
La última, y por tanto efectiva,
actual, selección (Hues, Mat, Quat) queda marcada en rojo, pasando a
gris las no elegidas
Los dos últimos operadores pueden
invertirse (INV), y obtener el determinante (DET) de la matriz, y el
conjugado (CONJ) del cuaternión.
La elección de uno u otro método de
obtención , matriz o cuaternión, genera el equivalente en el no
elegido.
Los valores concretos de cada
operador obtenido por alguno de los tres métodos, se publican en las
casillas numéricas apropiadas y tituladas. Información
adicional en el texto ampli encima de la etiqueta "Giro...".
Los botones OTRO y MISMO,
determinan si se renueva el esqueleto Kinect, tomándolo de la
cámara, o bien se emplea el mismo. La elección otro renueva también
los operadores correspondientes al hueso (HUES) en su casilla.
Podemos también tomar como fuente de esqueletos los almacenados en
las mociones en disco: se carga uno en la ventana de Contrapuntos y
Mociones; se TOCA, se PARA y allí mismo se trata (Rota o INterpola)
con los operadores seleccionados antes.
Vuelta al Principio Última
actualización:
domingo, 06 de septiembre de 2015
Visitantes:
