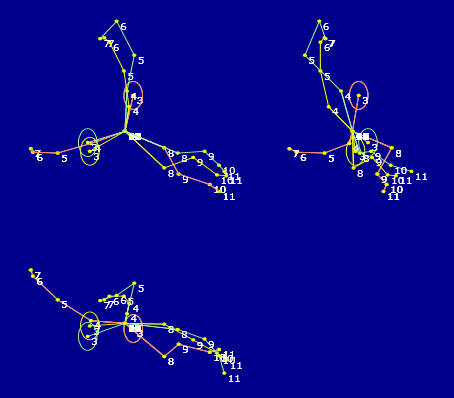
Es decir, el ruido 'desconcierta' al buscador, incluso con una desviación típica media de 10 mm (20, 50 10 en x,y,z). Vamos a limitar el número de puntos en la búsqueda (en concreto, para el cálculo de distancia en línea recta, cuerdas) para ver si la búsqueda es más segura y r´pida. En efecto, cuando reducimos puntos a hombros codos y cabeza, converge. Son más fiables, lo que revalida lo citado en Comparación con ISTDK. Además se reduce el número de operaciones y de ahí, el tiempo de cálculo. Otro caso en que las articulaciones de manos y muñecas (y cabeza) desorientan al buscador (primer caso). Cuando reducimos a cabeza, hombros y codos, se converge, y se converge rápido (2º caso y figura).
Dist: Ini= 526 65,0º | 22,0º Busca=04 mm| 19,0º | 10,0º
Res: 1 0.625 1
-0,461318731249129; 0,302114926409592; -1,04073711832618; 0,337317338716168
0,0425926704654612; 0,263927007480558; 0,922730686160967; 0,277662528912147
-0,39167701072271;0,256506972848058;-0,883625085741485148,037088356723
Dist: Ini= 523 64,0º | 21,0º Busca=06 mm| 19,0º | 09,0º
Res: 1 0.9375 1
-0,461318731249129; 0,302114926409592; -1,04073711832618; 0,337317338716168
-0,0263146674039252; 0,196898912078596; 0,941998675746143; 0,270512202301853
-0,39167701072271;0,256506972848058;-0,883625085741485148,037088356723
Dist: Ini= 526 65,0º | 22,0º Busca=01 mm| 19,0º | 10,0º
Res: 1 0.46875 0.1
-0,461318731249129;0,302114926409592;-1,04073711832618;0,337317338716168
-0,0227739039554768;0,201054394046745;0,944434323024267;0,259041096019179
-0,39167701072271;0,256506972848058;-0,883625085741485148,037088356723
Sin ruido Dist: Ini= 540 41,0º | 11,0º Busca=90 mm| 23,0º | 04,0º
Res: 1 0.078125 0.1
-0,461318731249129;0,302114926409592;-1,04073711832618;0,337317338716168
-0,0373218077656522;0,0998736170711611;0,845187141299383;0,523728020503477
-0,39167701072271;0,256506972848058;-0,883625085741485148,037088356723
Con ruido DT=10 Dist: Ini= 560 46,0º | 12,0º Busca=91 mm| 24,0º | 04,0º
Res: 1 0.078125 0.1
-0,461318731249129;0,302114926409592;-1,04073711832618;0,337317338716168
-0,0393779674692616;0,100574872036143;0,875845205999347;0,470350131200989
-0,39167701072271;0,256506972848058;-0,883625085741485148,037088356723
Ruido 10 Dos veces sucesivas
Dist: Ini= 557 45,0º | 12,0º Busca=91 mm| 25,0º | 04,0º
Res: 1 0.0390625 0.01
-0,461318731249129;0,302114926409592;-1,04073711832618;0,337317338716168
-0,0382162344030577;0,0999769813898108;0,870839528433735;0,479773528175164
-0,39167701072271;0,256506972848058;-0,883625085741485148,037088356723Lo mismo pero con incremnetal=.01 grados sexa Figura debajo
A simple vista se ve la pobre convergencia
Dist: Ini= 210 126,0º | 06,0º Busca=01 mm| 104,0º | 00,0º
Res: 1 0.15625 0.1
-0,378224760284999;-0,0291025243106742;1,7611586811461;0,0786926626946378
0,847921494706488;-0,51658333962585;-0,0824792107766373;0,0858368908184747
-0,209944132619806;-0,0161541624584477;0,977579922161755174,997758298157
Con esas articulaciones converge tomando 30º a priori, Sin ruido Con ruido
Dist: Ini= 187 03,0º | 14,0º Busca=188 mm| 27,0º | 27,0ºLa rutina queda por ahora así: ____________________________________________________________________________________________
Resultados: Cota_distan: ángulo salto: 0.05859375 salto increm: 0.1 ruido: 10 Pasos: 30
Incog eje: 0,274408469698147; -0,0657865204295606; 0,959360268870716
Estim eje: -0,0336506864508215; -0,0843953912138723; 0,995863971254732
Incog angle:176,211378407309
Estim angle:176,211378407309
Dist: Ini= 197 114,0º | 120,0º Busca=06 mm| 84,0º | 85,0º
Resultados: Cota_distan: ángulo salto: 0.05859375 salto increm: 0.1 ruido: 10 Pasos: 88
Incog eje: 0,274408469698147; -0,0657865204295606; 0,959360268870716
Estim eje: -0,917311824354365; 0,397842914449204; -0,0161255177352645
Incog angle:176,211378407309
Estim angle:176,211378407309
Incluso ruido=40 (desvtip =40mmm, todas las coordenadas de todas las articulaciones), quedando eso sí a más distancia media mayor 2 cm. En la figura siguiente se aprecia ya una separcion entre buscador e incognita (amarillo y verde) lógica porque ya no son iguales. Dist: Ini= 312 103,0º | 111,0º Busca=20 mm| 78,0º | 79,0º
Resultados: Cota_distan: 1 ángulo salto:30 a 0.00732421875 salto increm: 0.01 ruido: 40 Pasos: 55
Incog eje:-0,882628910705969;0,457500643856379;-0,10797854813338
Estim eje:0,236555283722422;-0,810783158686658;-0,535417843682007
Incog angle:145,73800197824
Estim angle:145,73800197824
Dist: Ini= 313 103,0º | 111,0º Busca=32 mm| 77,0º | 80,0º
Resultados: Cota_distan: 1 ángulo salto: 0.00732421875 salto increm: 0.01 ruido: 50 Pasos: 49
Incog eje:-0,882628910705969;0,457500643856379;-0,10797854813338
Estim eje:0,681137103849455;-0,657116393342618;-0,322878137011422
Incog angle:145,73800197824
Estim angle:145,73800197824
Incluso 100 mm Dist: Ini= 311 106,0º | 113,0º Busca=55 mm| 83,0º | 87,0º
Resultados: Cota_distan: 1ángulo salto: 0.00732421875salto increm: 0.01ruido: 100 Pasos: 39
Incog eje:-0,882628910705969;0,457500643856379;-0,10797854813338
Estim eje:0,714329646402739;-0,635036032847364;-0,294044883063146
Incog angle:145,73800197824
Estim angle:145,73800197824
Incluso 140 mm y segumos probabdo Dist: Ini= 319 113,0º | 119,0º Busca=60 mm| 92,0º | 96,0º
Resultados: Cota_distan: 1 ángulo salto: 0.00732421875 salto increm: 0.01 ruido: 140 Pasos: 63
Incog eje:-0,882628910705969;0,457500643856379;-0,10797854813338
Estim eje:0,20296046229761;-0,866059415230191;-0,456889636602845
Incog angle:145,73800197824
Estim angle:145,73800197824
Curiosamente, la distancia ´menor a la que se llega es aproximadamnte la mitad de la derciacaion típica impuest al esqueleto incógnita
'¡salto_incremental
'Intento con RUIDO Esto dunciona perfectamente sin ruido, converge rápido
Public Function reune_por_microaproximaciones_paso_controlado(ByVal pseudoskel_orig() As Point4D, _
ByVal pseudoskel_incog() As Point4D, _
angulo_salto As Double, cota_distan As Double, salto_incremental As Double) As Double
'Dim veces As Integer = 0
Dim pseudoskel0_1 = pseudoskel_orig
Dim distas, distas0 As Double '10 metros
distas = 1000
veces = 1
cuaternion_estimacion_total = Quaternion.Identity
parado = 0
MatrizBusqueda1 = contruye_mat_giro(salto_incremental, 0) : CuaterIncre1 = quat_de_matriz(MatrizBusqueda1)
MatrizBusqueda2 = contruye_mat_giro(salto_incremental, 1) : CuaterIncre2 = quat_de_matriz(MatrizBusqueda2)
MatrizBusqueda3 = contruye_mat_giro(salto_incremental, 2) : CuaterIncre3 = quat_de_matriz(MatrizBusqueda3)
otor_angulo:
MatrizBusqueda1 = contruye_mat_giro(angulo_salto, 0) : CuaterBusca1 = quat_de_matriz(MatrizBusqueda1)
MatrizBusqueda2 = contruye_mat_giro(angulo_salto, 1) : CuaterBusca2 = quat_de_matriz(MatrizBusqueda2)
MatrizBusqueda3 = contruye_mat_giro(angulo_salto, 2) : CuaterBusca3 = quat_de_matriz(MatrizBusqueda3)
Dim quater_sal As Quaternion
' Case 23 ' <‒-
quater_sal = CuaterBusca1 : quater_sal.Invert() : quater_salto(1) = quater_sal
' Case 25 ' ‒-> = Key.Right
quater_sal = CuaterBusca1 : quater_salto(2) = quater_sal
' Case 26 ' v
quater_sal = CuaterBusca2 : quater_sal.Invert() : quater_salto(3) = quater_sal
' Case 24 ' ^
quater_sal = CuaterBusca2 : quater_salto(4) = quater_sal
' Case 20 'PgDn
'pòr ahora
quater_sal = CuaterBusca3 : quater_sal.Invert() : quater_salto(5) = quater_sal
' Case 19 'PgUp
quater_sal = CuaterBusca3 : quater_salto(6) = quater_sal
'Public quater_salto(6) As Quaternion
'SI HAY RUIODO, HABRÁ QUE ^PONER OTRAS DETENCIONES AUTOMATICAS
'Por estabilidad de valores por encima de la cota de fin
While distas > cota_distan And veces < 1000 And parado = 0 'Then ''milimetros
'elige la mejor
quater_sal = elige_el_mayor_gradiente_incremental(pseudoskel0_1, pseudoskel_incog)
'pseudoskel0_1 = realiza_una_microaproximacion(pseudoskel0_1, quater, pseudoskel_incog)
pseudoskel0_1 = realiza_una_microaproximacion_opciones(pseudoskel0_1, quater_sal, pseudoskel_incog, 1, 1)
cuaternion_estimacion_total = cuaternion_estimacion_total * quater_sal
distas0 = distas
distas = 1000 * distancia_pseudoskel(pseudoskel0_1, pseudoskel_incog)
veces = veces + 1
'retoco angulillo? si sobrepaso minimo
If distas >= distas0 Then
'peligroso
angulo_salto = angulo_salto / 2
If angulo_salto >= salto_incremental Then GoTo otor_angulo
Exit While
End If
End While
Dim dif_cuater = cuaternion_estimacion_total - cuaternion_incognita
dif_cuater.ToString()
'If informa = 1 Then presenta_cuaternion(cuaternion_estimacion_total)
adosa_texto("Res:" + cuaternion_incognita.ToString() + cuaternion_estimacion_total.ToString())
Call informar(matriz_ventana.TextBox10.Text)
Return distas
End Function
____________________________________________________________________________________________ Nos preguntábamos ¿qué nos queda? 1. Esqueletos completos 2, Variar la distancia, es decir su tipo. (incluso distancias entre cuaterniones y matrices) 3. Añadir orígenes diferentes a cada imagen (translación diferente para cada uno, situación que se presenta con dos cámaras. 4. Operar con dos cámaras reales, diferentes y simultáneas. 5. Promediar los operadores estimados sobre varios esqueletos (¿1 segundo, 30 imágenes?).