c:DuetoXVProceso
c:DuetoXVI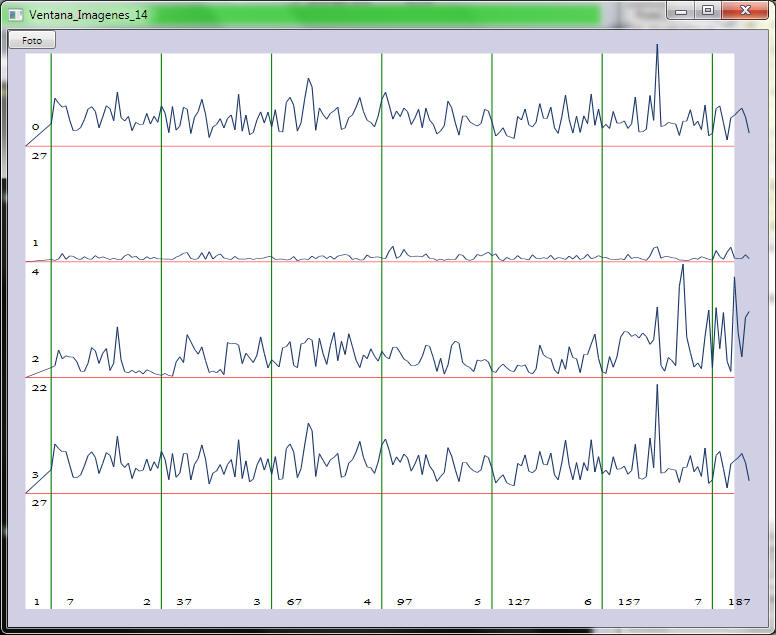
SITUACIONES de las ARTICULACIONES del ESQUELETO KINECT
Coordenadas de pantalla
Coordenadas absolutas (0); O relativas (1): a centro cadera (0) o centro hombros (2):
1 0
Fiabilidad de la captacion:
1
Número_pulsos:
200
Tres coordenadas espaciales x y z :
Número de Articulaciones:
20
pul ms | 00 | 01 | 02 | 03 | 04 | 05 | 06 | 07 | 08 | 09 | 10 | 11 | 12 | 13 | 14 | 15 | 16 | 17 | 18 | 19 |
0 23 Fiabilidad:
0 2 1 2 2 2 3 2 4 2 5 1 6 1 7 1 8 2 9 2 10 2 11 2 12 2 13 2 14 2 15 2 16 2 17 2 18 2 19 2
0 000 000 000 1 -005 -015 -009 2 -031 -092 -049 3 -036 -133 -066
4 -060 -054 -033 5 -079 -013 -017 6 -076 036 -029 7 -081 053 -026
8 007 -070 -057 9 018 -003 -057 10 -004 047 -042 11 -011 067 -033
12 -008 015 011 13 -043 121 070 14 -034 215 100 15 -038 234 084
16 018 012 003 17 016 137 053 18 020 215 070 19 016 190 057
23
0 9 Fiabilidad:
063 -076 -025 9 067 -047 -011 10 063 -016 -017 11 049 -032 -032
12 013 -017 -012 13 005 085 028 14 -012 127 044 15 -010 096 040
16 048 -018 -003 17 073 -062 -088 18 078 -117 -149 19 075 -093 -131
6673
Distancia_bloque: 88
Calibración: | Cuat: ,000 ,000 ,000 1,000 | áng: 000 090 090 090 grados Eje: 090 000 090 Ángulo: 0 º
| ,036 ,297 1,018 -0,002 | 088 073 NeuN090
| -,271 ,824 -,231 -,002 | 106 034 103 090
| -,895 -,264 ,108 ,065 | 154 105 084 086
| 1,000 | 000 grados
/danzante/mociones/Graba Auto 12-02-2017_18.50.55.CAL.0-0.D.89.mc2
Inclinación cámara 0: -15 Inclinación cámara 1: -15 Escalas dibujo: 226 Escalas a mm: 1000
Cuadros: 200 Cámaras: 2 Retardo 1 de 2: 10 Fecha: 12/02/2017
Cuadros perdidos camaras 0, 1: 0 0 Fiabilidad media (de 0 a 2) captación cámaras 0, 1: 0 0