 |
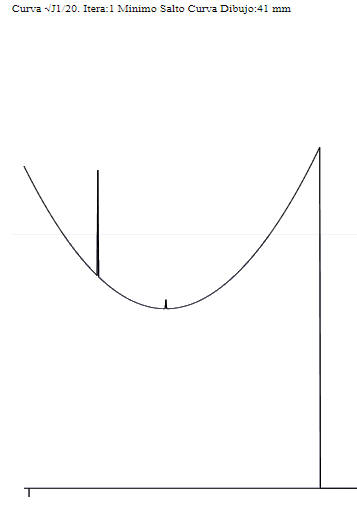
La curva de la izquierda
representa la función J1 pero transformada en Raiz cuadrada de
la media de esa función sobre sus articulaciones. La línea vertical es el valor 0 de la abscisa, Esta abscisa es el incremento dp que se aplica al esqueleto compuesto del promedio de los de las dos cámaras o, cuando el algoritmo está corriendo en tiempo real, el esqueleto optimizado del cuadro anterior. Mediante esos incrementos de dp nos acercamos gradualmente, siguiendo el método de Newton Cramer (llamado en nuestro artículo Line Search), al mínimo, que representa el compromiso óptimo (para las funciones y ponderaciones adoptadas) entr elas tres funciones que tiran de ese esquleto. Promerioo pìonderado entre esquekletos de cámaras, longitudes de huesos obtenidas en calibración, y esquleto optimizado anterior que ha realizxado ese acercamiento. , y del cual se espera que sea cercano al actual, debido al coertto tiempo entre cuadros (alrededor de 30ms. La curva es mon´toma (y suave) a ambos lados del mínimo. Es dcir tamto la función como su pendiente (en valor absoluto) decrecen uniformrmrntr hasta llegar a mínimo. la variable es un vector con 60 coordenadas cuya variación produce esa ciurva suave. Otro vector cuaklquiera perdería esa cualidad suave en la curva. |
y en la matriz diagonalΛ = { δ/ δ p*i ( Σi,j ε Sa ( || pi* - pj* || - Li,j ) 2 ) } o sea Λ = { δ/ δ p*i M)
bp = - { δ/ δ p*i Σi wiA || pi* - pi || 2 + wiB || pi* - (Rqi + t ) || 2 } o sea bp = { - δ/ δ p*i Σi j0 )
todos ellos componentes de matrices como comoH , con hi = δ2/ δ (p*i)2 ( wiA|| pi* - pi || 2 + wiB|| pi* - (Rqi + t ) || 2 ) o sea hi = δ2/ δ p*i2 j0i
▼J2 (X) d y ▼J (X)